So given it was a non-work night and predicted to be clear Dave invited me over to test the gear/setup prior to the BASEG Tenerife 2024 trip.
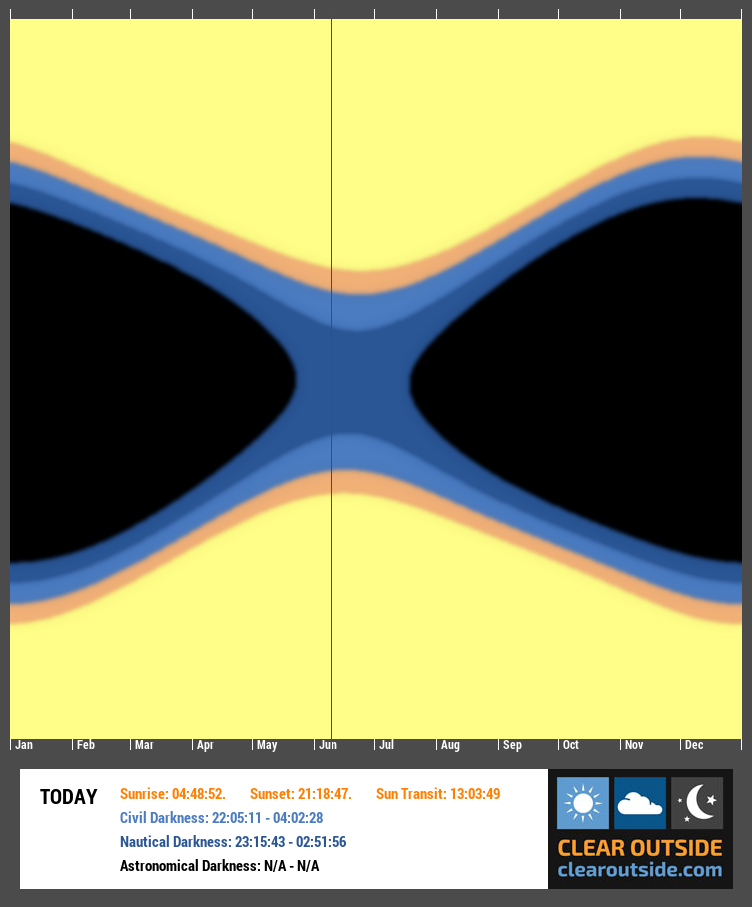
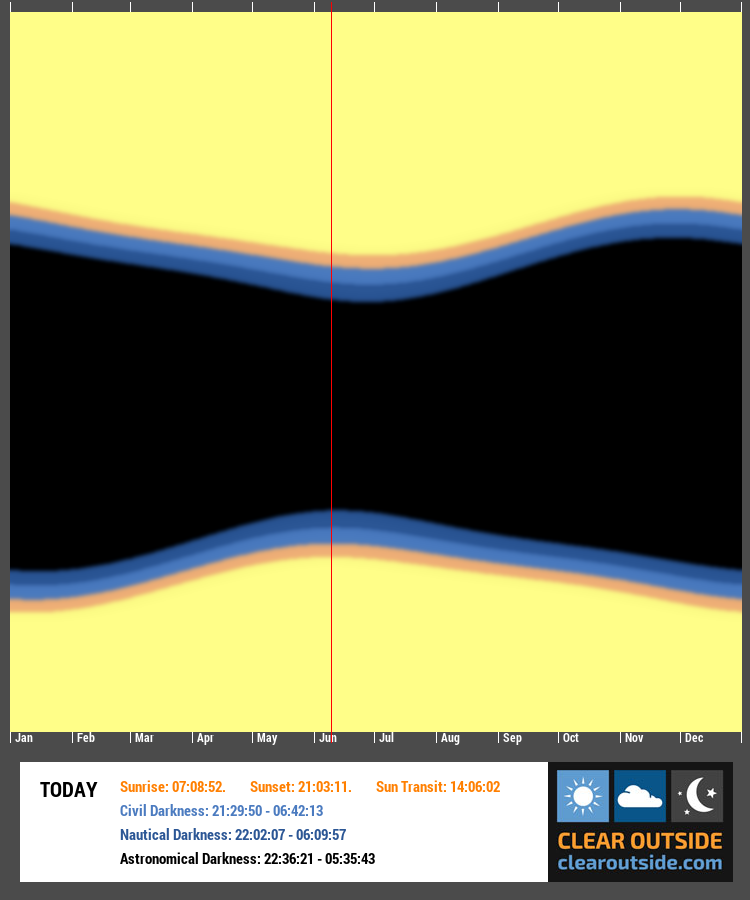
Given we are fast approaching the summer solstice, the nights are getting shorter and lighter. The Annual Darkness chart for IMT3 shows that we currently have no astronomical darkness and the nautical darkness lasts only for some 3.5hrs (left image) and now compare that the darkness graph for Mount Teide in Tenerife (right image) and although we lose some dark hours around the Summer Solstice it’s not as much as is lost being located at 52°N.
Setup – added BlueAstro stick station to measure pressure as Pegasus have not exposed the pressure measurement from the NYX101 mount to the ASCOM layer … why not ? Added weight bag to NYX-101 and GL.inet travel router to top of the scope as MS Windows keeps messing up the Wi-Fi hotspot on the Mele Quieter3C if it does not detect a internet connection ….. how stupid is that. Now I have a permanent hotspot thanks to the instructions given by Cuiv the Lazy Geek on his YouTube channel.
When attempting to polar align when using the QHY PoleMaster I noticed that the sky brightness below 15 mag2/sec (measured by a Unihedron SQM) produced a white screen due to over exposure – the minimal exposure in the now aged the QHY PoleMaster software (> 4yrs since last release) was 50ms which is too long even though I could eyeball Polaris in the early evening sky.
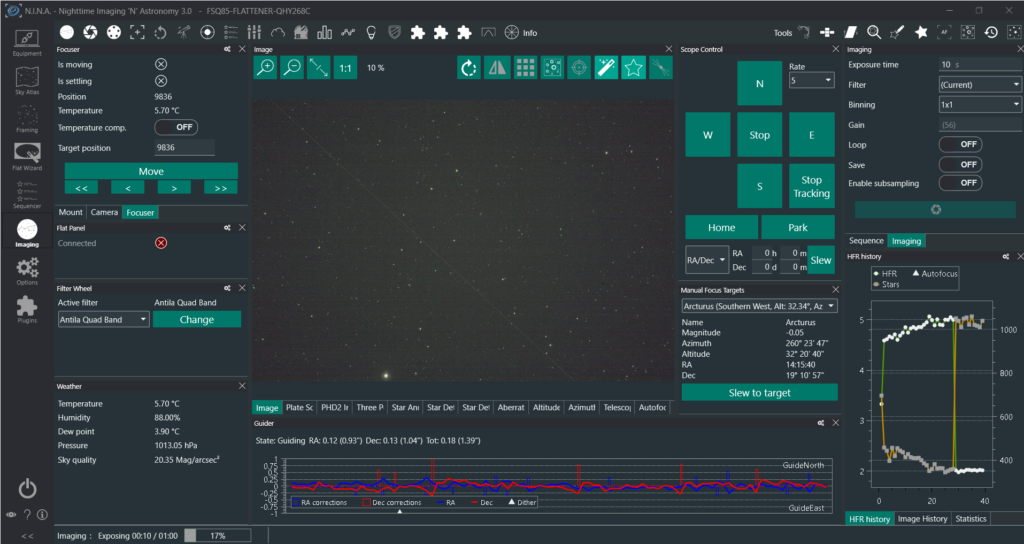
NINA 3.0 start up had not detected the QHY native driver and after I shutdown and restarted the app it then was able to detect the QHY 268C camera. However, it disconnected when it could not cool to -10℃ which I’ve never encountered before. I did eventually managed to get it cool and stay connected.
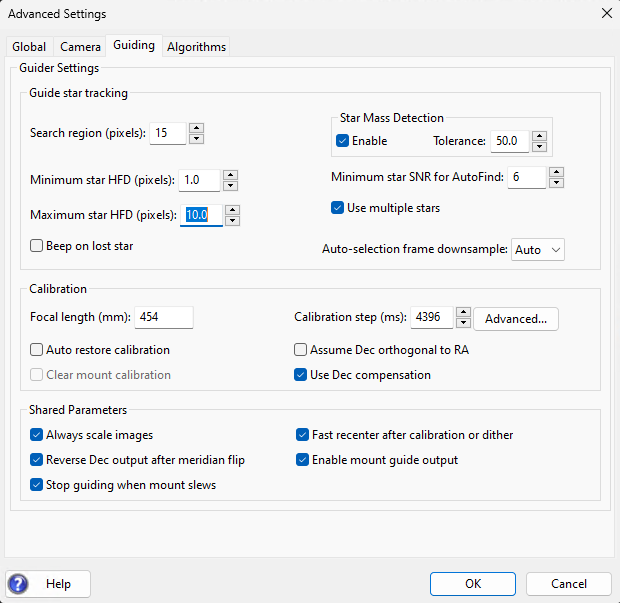
During guiding calibration OpenPHD2 would constantly complain about losing the star. Again the star was clearly visible on the PHD display and after downgrading from 2.6.13dev4 to dev3 and then I suddenly realised the value the error was referring to. I changed the minimal star HFD down to 1.0 from 1.5, also recreated the dark library to remove the possibility of the guider attempting to guide on a hot pixel.
Once guiding, the guide graphs were reporting 0.08 – 0.19 arcsec total polar alignment error. Hopefully I will learn to improve that and maybe repeat the polar alignment procedure or use PHD drift align to refine it.
I also forgot to change filter at the start of the evening from the Antila Quad Band filter to the Baader UV/IR filter. I noticed a halo from the bright star Arcturus in the constellation Bootes which I was testing autofocus on but I decided to continue regardless as I was only testing.
The goal for the night was to grab a base image of T Coronae Borealis (“The Blaze Star”) before it goes nova – it’s a reoccurring nova with a 80 year cycle. The star is currently hovering around 10.2 magnitude and it is predicted based on previous eruptions to reach around magnitude 2. As I ultimately wanted to perform some photometry on the star using the UV/IR cut filter I did want to blow out the cores of any bright star so I opted to use the ExtendedFullWell2CMS mode at gain 0, offset 30 with 60 second exposures. During the sequence I forgot to watch HFR/Star count graph and it rose above 5 which meant I have to refocus to (HFR ~2.0) and so due to my oversight due to chatting I will have to dump a lot of the early subs.
At the end of nautical darkness I stopped the sequence and used the NINA flat wizard (dynamic exposure) with the old PegasusAstro 120 flat panel at 100% brightness to create 25 flats and flat darks for a target of 33% ADU. After packing up and the with the pre-dawn temperature hitting 4℃ just before 4am I was looking forward to getting to bed.
At the next clear non-working evening I will attempt to grab some subs again but this time using the correct filter. Thank you to Dave and family for hosting me once more.
NB – NINA 3.1 was formally released the following day (09/06/2024) !
I’ve always liked what PegasusAstro have been doing with their astronomy equipment and I already own an original FlatMaster120, UPBv1 and a UPBv2.
Overview
Packaging – The mount transport box is (21cm x 34cm x 34cm) which is larger than the AM5 transport box. Weight/Size (6.4 Kg compared to ZWO AM5 5 Kg). The build quality follows the same high quality and blue anodised styling of recent products.
On opening the packaging I found damage to the mount knob indicated a possible rough handling in transit with plastic shrapnel in its plastic bag. This was superficial and did not impact the function or integrity of the mount.
There was no hand-controller supplied in the box but the manual hints that a hand controller can be connected to the ST-4 (EXT) port but no detail on if that is compatible with any existing hand controllers, so for now we have to use the Unity PC application, ASCOM access or the mobile phone application (Android).
The USB2.0 port is better than others I have encountered on other mounts such as iOptron and it grasps the cable securely and does not feel loose or feels like it would just drop off. This is especially useful as I tear down each night so let’s see over time if it maintains the positive connection it has at the moment. I connected the mount USB and power to the UPBv2 sat on top of the scope.
The carbon fibre tripod has no stone bag which can be found on other astro/photography tripods. You could suspend some form of weight from the leg spreader that might help prevent the tripod from tipping over with heavier scopes.
I found the Altitude adjustment a bit loose and takes a bit of getting used to even though the NYX101 has altitude tightening bolts which themselves seem to shift the altitude which again affects polar alignment if you are not careful.
Due to the compact nature of the mount there is no room for a GPS receiver so this function is relied upon either from your phone or by pushing the values from Unity or via Uranus device. If you push from your phone and you have Unity running then Unity will not see the change until you restart Unity.
I like the SW tripod (adapter required) and M12 counterweight compatibility, LX200 protocol support, polemaster placement support. There is a polemaster mounting plate but this is a permanent fixture via screws with no quick release mechanism. However there was a post on Cloudy Nights by PhilippeL on a release adapter he made, CAD link here.
Experience
Usage
Set your park/home positions and then enter in your location/altitude via Unity/Mobile phone app so that the mount understanding things like horizon limits.
As with other mounts, care needs to be exercised that your scope does not collide with the tripod legs, this is still a risk when using the pier extender with longer length scopes.
Unity Software
I couldn’t find a change history or date on the released Unity Platform on the website so it’s not easy to look back when things happened but you can use this link to check the currently available version. I used version 1.8.1733.15, when upgrading the existing Unity software the update process will remove all older versions including the ASCOM drivers and then install the latest version.
I do seem to lose wireless connection to my house router randomly even though the mount was positioned within 6ft of it. I had setup the router to give the mount a static IP address via DHCP but I don’t know it loses the connection – DHCP lease time is set high.
Firmware Update
When I first looked at configuring the NYX-101 to connect to my house network I had no end of trouble getting a connection. The only way I could achieve a connection was to have both the PC/laptop and mount connect to one of my travel routers which itself was also connected my the house wifi.
I soon worked out that the “Smart Connect” feature of my house wifi router was attempting to connect the ESP32 wireless (2.4GhZ) of the NYX to the 5GhZ band. Once I had put the MAC address of the NYX-101 into the exclude list of the house router 5GhZ band then it would reliably connect to the 2.4GhZ band. From that point onwards everything worked as expected and I could then successfully perform the firmware update to 1.15.
The 1.19 firmware (released the week 13th March 2023) also brought a pleasant surprise of the motor noise being reduced when slewing. This is a welcome change since making any noise in a suburban garden location in the early hours of the morning when people sleep with their windows open is highly undesirable.
Resetting park & home
I actually turned off the mount by accident whilst the mount was pointing somewhere in the sky so it lost its position and didn’t know where park and home was. This is easily rectified by moving the mount via one of the applications to the correct marks and setting the home and park positions again. This issue was mostly solved with a later firmware update where the mount now remembers where it is pointed once power is restored. However on performing a meridian flip (no slew & center) and then instructing the mount to home resulted in the mount not being it’s predefined home location.
Mobile App (Android)
Originally there was only Android11+ support but after raising a support ticket (support@pegasusastro.com) to request that the documentation state that the linked app only supported Android 11 I also requested a pre-Android 11 support. This actually appeared pretty quickly on the website so kudos to PegasusAstro for the fast response.
I do suffer regular disconnects from the mount when using the mobile app via the hotspot. I’m not sure why this is as I was sat right next to the mount, could be down to an idle time-out ?
I also see the NYX-101 disconnect from my house wireless router in Unity but could locate no reason why (DHCP lease was valid), I could find no entry in the Unity log files or see no reason on the router. Now this could possibly be either interference from other 2.4GhZ networks or down to the Aluminium casing, would an external aerial resolve this problem ?
There is no way to reconnect to the wireless other than shutting down Unity so as long as you have a USB connection then everything should continue working.
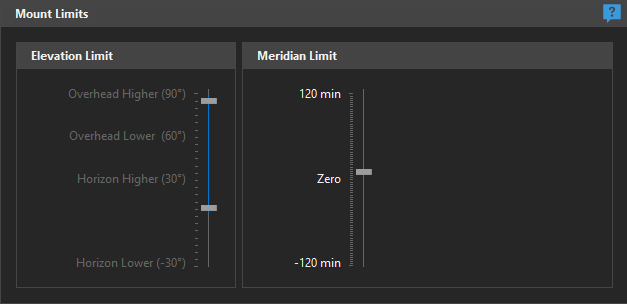
Mount/Altitude Limits & Meridian Flip
To begin with I set the meridian and altitude mount limits in Unity and then test the automated meridian flip using ASCOM simulator for the camera. Regardless would I did the mount would stop 10 degrees because hitting the Meridian. It slowly dawned on me that I had set the meridian limit to -10 which I thought was 10 degrees after the meridian but the value should have been +10 so it was actually stopping 10 minutes before the meridian ……. dooh !
Unity hard limits for Elevation & Meridian
Once I made the change then both NINA and SGPro performed the meridian flip just fine. There is also a switch to enable automatic meridian flip to prevent any potential crashes but I opted to leave this disabled so the mount would just stop tracking but NINA would continue taking new subs in both simple & advanced scheduler.
One item that would really help here in a text box with optional input to set either limits instead of having to grab the slider to see the current setting – I can query/set this in the API but it’s not easy to view and change using the slider method.
Polar Alignment
I used the polemaster software to perform a polar alignment but decided to utilise SharpCap to compare the alignment procedure and difference. Because SharpCap requires the scope to be slewed 90° so the scope weight was now on on horizontal the RA axis dropped causing the mount to shift and results in the PA being 4° off axis.
This would happen regardless even if I tightened up the axis bolts. Talking to another user he suggested at using a counterweight but to me this would negate the mount as a portable mount.
Guiding
Using the OpenPHD guiding reference document (link), it appears the that the harmonic gears have a period of 430 seconds with a periodic error of +/- 20 arcsecs or less. Two complete periods are required for the Permanent Periodic Error Correction (PPEC) before guiding any improvement will be seen, this is pertinent for the imaging train in use at the time. If you change the imaging target the model will re-initiate the PPEC learning cycle.
The recommendation is to set the guiding interval to 1 – 1.5 seconds and try to be within 30 arcsecs of polar alignment error. I certainly found keeping the FSQ85 setup to around 1.5 seconds resulted in better guiding graphs compared to 3 second intervals.
Support
After initially purchasing the mount I took my NYX-101 along to Astrofest 2023 (UK) for Evans to look at (by prior appointment) as I was not entirely happy with the resonance during slewing. I compared my mount against two other NYX-101 mounts in my astronomy society and it definitely sounded like it had been treated roughly during delivery transit. Although Evans did a great job to investigate the mount during the show, due to the noisy nature of the exhibitor floor it was not obvious that it had been resolved until I was in a quiet environment back at home.
On contacting PegasusAstro I was offered to have the mount picked up by DHL and couriered back to Greece for inspection. The whole process from DHL pickup was professional from picking up to receiving the mount back, the service was excellent and he mount was backed with me 7 days later. The courier communications was good but I received no notes or communication on what was done (board serial number was the same) under I enquired. The most important thing the mount operation was much better and more akin to the other two reference mounts I had listened to; my gratitude to Evans and the team for their patience with me.
It had been reported on various forums that the ZWO ASIAir had suddenly stopped working with the NYX-101 and some heated speculation quickly arose as to the reason why this occurred. ZWO was quick to dispel any conspiracy theories and rightly put their hands up and stated it was a bug in ASIAir software (link) which would be resolved in the 2.1 beta release (you will also need the latest firmware). Kudos should go to ZWO for setting for the story straight and resolving the issue to the benefit of the astro community.
First Light Use
So Dave asked me to come over to the observatory for the evenings of 26th & 27th so I could do a test run on the kit I would be taking to Tenerife later that Summer. At this time the M101 Supernova SN 2023ixf so I decided to image it alongside Dave using his 17inch RDK and Bob’s 24 inch RDK.
Using the QHY Polemaster I noticed that when I rotated the mount for alignment that the chosen calibration star moved away from the rotation circle – is the mount slightly misaligned ?
The guiding document available here were extremely helpful in testing out various settings. Certainly I was seeing some trailing around 3 seconds but that could have been due to the PA issues or balance. I ended up using Predictive PEC and setting the interval to 1 second just to see what would happen. I still noticed large variations every now and then and it was not as smooth as I’d hoped for.
Slewing to a target after plate solving it was clear that the mount had moved outside my FoV at first slew. This was unusual for me as my CEM60/NEQ6 first slews were always in the FoV, this issue may be related to an situation observed by Chris Woodhouse and can be rectified by following his forum post.
Chris asked me to confirm his experience of overshoot when slewing in the DEC axis causing the target not to be in resulted field of view. Chris had raised a support ticket for this issue and PegasusAstro were investigating.
Closing Thoughts
The NYX-101 is more expensive that the competing ZWO AM5 but the NYX-101 offers more weight carrying capacity (20 Kg versus 13 Kg without counterweights) and compatibility with those already own QHY Polemaster, SW NEQ6 or similar tripods.
The direct open API (REST) via Unity or access via ASCOM Alpaca allows me to query components and it’s easy to script up web status pages quite easily.
If you only ever plan to use light imaging equipment and are already invested into the ZWO eco system then the AM5 might make more sense but if you wanted to use other vendors equipment then for me ZWO is a closed ecosystem with limited flexibility.
If using USB3 cables for any equipment such as CCD/CMOS cameras then it is wise to invest in a high quality shielded cable as USB3 tends to have issues in the presence of 2.4GhZ. I used 5Ghz wireless from my Mele Quieter3c mini PC to avoid this problem but I would advise to use good shielded cables in all situations.
I’m looking forward to taking the mount on the upcoming trip to Mount Teide, Tenerife to see how well it performs under dark and clear skies 😀
Wishlist
The following wishlist is based on my experience of using the NYX-101 alongside the Ultimate Power Box v2 (Firmware 2.4) and NYX-101 (Firmware X.Y.Z) via the Unity software (1.9.1825.32) :
Would be nice to see dust covers provided in the box for all the various ports on the back of the mount.
An external aerial port might be useful for the included ESP32 wireless connection ?
An option to power other Pegasus items such as the UPBv2 from the aux power port on the mount ? This would mean that then I would only have one cable going up/down from the scope to the mount which is especially useful for those who are mobile and don’t use the NYX mount in a permanent setting.
Include a hand controller in the default offering or document compatibility with any existing hand controllers. Could utilise the USB port instead of relying on the ESP32 internal module ?
Display the MAC address of the ESP32 module in the Unity app (wi-fi network tab) so it’s not necessary to hunt for it in the router’s client connection pages.
A disconnect/reconnect button for an existing wifi connection definition.
An editable display box for both the meridian and altitude limits where I can enter the desired value as I can only know what the settings are by actually grabbing the sliders or reading/setting the position from the REST API.
API call to set/get horizon & meridian limits as a profile similar to the location. This would allow the user with different scopes/piers/tripods to store different hard horizon/meridian and auto meridian flip settings.
If possible add a NYX-101 uptime value to Unity and API similar to other products like the UPBv2 to show how long the NYX-101 has been powered on.
If possible add a timer field to the wireless tab to indicate how long the mount has been connected to the configured wireless access point and/or the USB connection.
The NYX-101 health status in Unity sometimes doesn’t not render correctly on smaller/different aspect screens between Unity releases such as a Dell 13.3″ laptop.
API call to provide NYX-101 health status if the information is not already available via other API calls.
API call to indicate if a new firmware (inc version) is available as it is indicated in Unity ?
A changelog history for NYX-101, Unity & UPB between versions.
Update
As of May/June 2023 there is now a XT60 cable available to run from the AUX port to run to the UPBv2 and now I only need an adapter cable to fit my 10 Amp PSU with a XT60 connector.
14th June : Firmware 1.21 released by PegasusAstro and the patch notes show this release fixes the DEC axis overshoot experienced by Chris Woodhouse :
DEC motor accuracy improvement during slews. In previous firmware declination axis tends to overshoot.
Wi-fi hotspot channel width was reduced from 40MHz to 20MHz to improve channel data integrity.
Wi-fi hotspot can turn ON and OFF.
Wi-fi hotspot channel can be selected from 1 to 11 (11 is the default).
Reset home is not allowed when mount is hard encoder limit.